
www.ptreview.co.uk
26
'26
Written on Modified on
Photoneo simplifies 3D sensor workflows
PhoXi Control 1.17 introduces an interactive ROI setup, enabling faster setup, cleaner point cloud processing, and more intuitive deployment of industrial 3D vision applications.
www.photoneo.com
Photoneo has released the PhoXi Control 1.17 software package to modernize the setup workflows of its high-performance three-dimensional vision sensors.
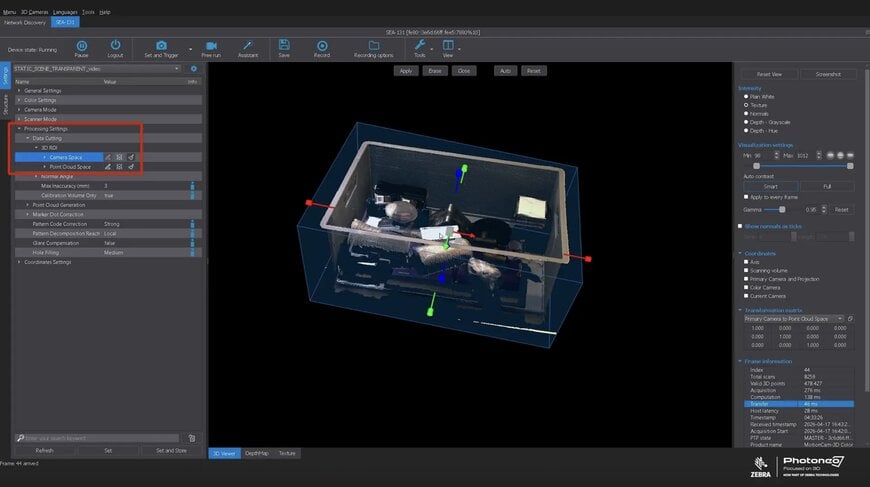
The technical update involves replacing manual coordinate data entry with a fully interactive three-dimensional bounding box integrated directly within the sensor's point cloud visualization suite. This solution addresses the requirement for accelerated commissioning times, high-accuracy scene cropping, and reduced processing latency across automated manufacturing and industrial robotics sectors.
Point Cloud Volume Pruning within the Digital Supply Chain
The relevance of this spatial optimization technology stems from the need to eliminate irrelevant peripheral data before it travels downstream into the digital supply chain of a robotic workcell. When an advanced vision system scans a workspace, it inevitably captures structural background noise such as conveyor frames, physical safety barriers, and floor geometry. By establishing a precise Region of Interest (ROI), the software defines a definitive spatial volume within the sensor’s field of view to exclude all extraneous geometries post-capture. This targeted filtering ensures that downstream localization, grasp planning, and quality inspection algorithms process only the critical coordinate points, lowering local compute strain and maintaining an optimized data exchange framework similar to an automotive data ecosystem.
Dynamic Geometric Interaction and Software Translation Mechanics
The core advancement of the 1.17 version centers on a shift in the human-machine interface layer away from rigid numeric parameterization. Previously, system integrators defined an ROI box by manually calculating and entering six independent boundary variables corresponding to minimum and maximum thresholds across the X, Y, and Z axes. The updated framework introduces manipulable geometric handles that allow operators to grab, stretch, and rotate the faces, edges, or corners of an overlaid box directly against a live point cloud. This real-time spatial feedback completely eliminates the traditional trial-and-error scanning loops required to verify numeric boundary selections.
Deployment Topologies and Quality-of-Life Optimization
The interactive boundary tracking mechanism brings measurable advantages to variable and non-standard industrial environments:
- New Cell Commissioning: Compressing the setup timeframe for complex bin-picking or object-sorting applications by allowing field technicians to fit spatial boundaries intuitively around a parts receptacle.
- Field Maintenance Realignment: Enabling rapid recovery and adjustment if a physical sensor bracket is bumped or if an underlying manufacturing fixture shifts over time.
- Partial Scene Isolation: Streamlining localized data subsetting, allowing engineers to isolate a precise pallet position while discarding surrounding warehouse reflections.
Furthermore, a visible, interactive bounding box serves as a self-documenting configuration file across distributed engineering teams, facilitating clearer system replication without requiring extensive coordinate translation logs.
Additional Context
This section details technical specifications and competitive benchmarking not included in the original news announcement.
In comparison to standard proprietary three-dimensional camera software packages from competitors like IDS Imaging Development Systems (with the IDS peak platform) or Zivid, Photoneo's native point cloud manipulation tool brings functionality typically reserved for standalone analytical software like CloudCompare directly into the device control layer. While conventional vision controllers often process uncropped arrays that demand massive data buffers, isolating point geometry at the device boundary reduces transmission overhead and post-processing latency.
Technical benchmarks indicate that restricting downstream algorithm inputs to a tightly tailored volumetric space can reduce localization processing times by up to 40%, depending on the complexity of the part geometry. The accompanying software protocols conform to standard industrial communication layers and operate within a data path designed to lower system failover latency to millisecond parameters. This transition from blind numeric parameterization to data-verified, interactive scene mapping reduces potential deployment error rates by approximately 15%, delivering a highly scalable standard for advanced industrial vision modernization.
Edited by Romila DSilva, Induportals Editor, with AI assistance.
Additional Context
This section details technical specifications and competitive benchmarking not included in the original news announcement.
In comparison to standard proprietary three-dimensional camera software packages from competitors like IDS Imaging Development Systems (with the IDS peak platform) or Zivid, Photoneo's native point cloud manipulation tool brings functionality typically reserved for standalone analytical software like CloudCompare directly into the device control layer. While conventional vision controllers often process uncropped arrays that demand massive data buffers, isolating point geometry at the device boundary reduces transmission overhead and post-processing latency.
Technical benchmarks indicate that restricting downstream algorithm inputs to a tightly tailored volumetric space can reduce localization processing times by up to 40%, depending on the complexity of the part geometry. The accompanying software protocols conform to standard industrial communication layers and operate within a data path designed to lower system failover latency to millisecond parameters. This transition from blind numeric parameterization to data-verified, interactive scene mapping reduces potential deployment error rates by approximately 15%, delivering a highly scalable standard for advanced industrial vision modernization.
Edited by Romila DSilva, Induportals Editor, with AI assistance.
