
www.ptreview.co.uk
09
'23
Written on Modified on
Panasonic develops robotic motion teaching technology
Panasonic Holdings Corporation has developed a new technology that can teach robot motions that includes contact with the surrounding environment (doors, tables, and more), control parameters that achieve both performance that correctly completes the taught motion and safety during contact.
As the use of industrial robots advances, technology for efficiently programming robot movements is becoming more and more important. In particular, in environments involving contact with people and objects, movements that reduce the risk of contact while performing tasks accurately are required, but robot control that achieves both is known to be extremely difficult.
Therefore, we have developed a method to efficiently program a robot assuming it behaves flexibly like a spring. We developed a novel method to learn stiffness parameters of inpedance control to satisfy both task performance and safety requirements by segmenting the motions taught to robots demonstrated by humans and multi-objective Bayesian optimization.
The advancedness of this technology has been recognized internationally, and it has been accepted to the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2023, a top conference for AI and robotics technology (having an acceptance rate of 43%). It will be presented at the plenary session to be held in Detroit, Michigan in the USA from October 1 to October 5, 2023.
Overview
Direct teaching, in which humans directly teach robots movements, is widely used as a method of programming robot movements because of its simplicity. However, when a robot reproduces a taught action in an environment where there is contact with objects or where people or other robots cooperate or divide labor, it becomes necessary to deal with the risk of unforeseen contact in order to avoid damage to people, objects, or the robot itself, making it difficult to utilize robots for certain tasks.
In the field of control technology for flexibly moving robots, there is impedance control,*1 which mimics a virtual spring system and gives the robot flexibility like a spring. If an appropriate spring system parameter (impedance gain) is set, it is possible to reduce the risk of contact while having the instructed operation performed accurately.*2 However, with impedance control, there is generally a trade-off between safety and motion accuracy, and it is difficult to set an impedance gain that optimizes both at the same time.
Also, in order to achieve the desired task, it is necessary to accurately perform multiple consecutive actions. For example, in the case of opening a door, the robot must 1) approach the knob, 2) turn the knob, and 3) open the door. However, optimum impedance gain differs for each operation.
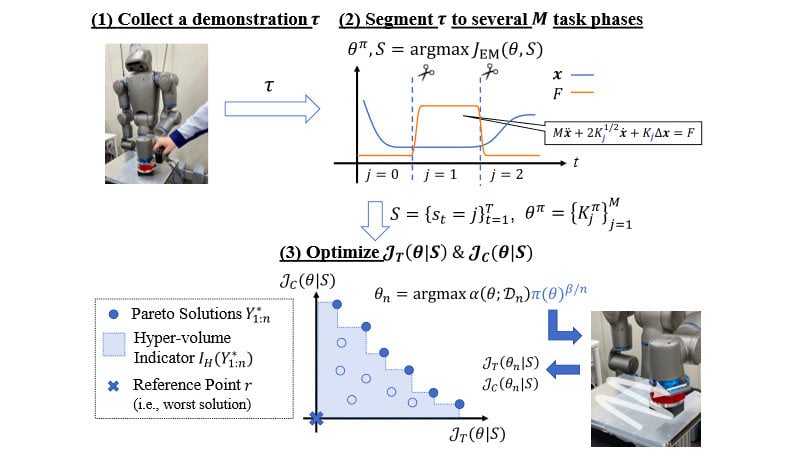
Therefore, as shown in Figure 1, we developed a method that first segments a series of motions being taught to facilitate parameter optimization, and then finds the optimal impedance gain for each segment using multi-objective Bayesian optimization.
First, the newly developed task segmentation method IC-SLD (Impedance Control-aware Switching Linear Dynamics) assumes that a series of demonstrated motions is generated by multiple combinations of spring system motion equations assumed by impedance control, and defines this as the problem of inferring the unknown impedance gain and the switching time of the equation. IC-SLD solves this problem by minimizing the error between the predicted trajectory and the actual taught trajectory. Compared with conventional methods (e.g. GMM*3 or SLD*4), IC-SLD realized segmentation suitable for optimization. (Figure 2: Results of task segmentation in door opening task using IC-SLD and the conventional method).
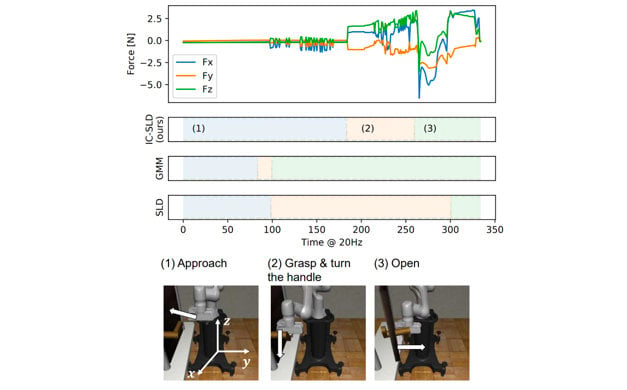
Figure 2: Segmentation results for the door opening task performed using IC-SLD and the conventional method. Quoted from Fig. 4 of the accepted paper.
Subsequently, the impedance gain is explored through Bayesian optimization*5 using prior knowledge. Since IC-SLD also outputs an estimated value of the impedance gain, using this as a solution candidate makes optimization more efficient. By applying Bayesian optimization π-BO [Hvarfner+,ICLR2022] that is able to make use of prior knowledge, optimal impedance gains that simultaneously optimize task performance (the cumulative sum of reward functions) and safety indices (the cumulative sum of stiffness parameters) are searched while repeating robot motion trials. Experiments on simulated tasks and a real robot demonstrated that our method allows for learning the impedance gain in a shorter time than the conventional method.
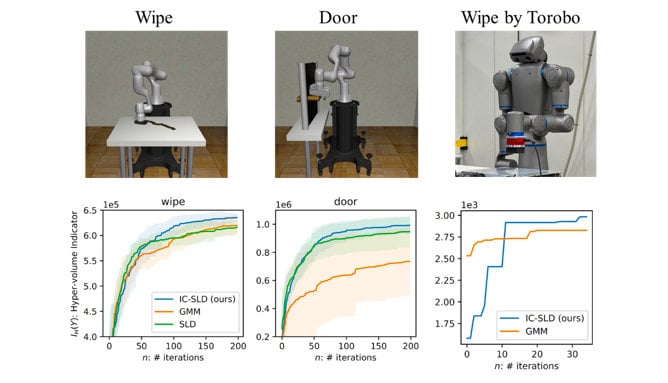
Figure 3: Learning results of impedance gain in simulation and actual equipment using the newly developed method. The horizontal axis is the number of trials, and the vertical axis is an index that combines task performance and safety. Quoted and processed from Fig. 3 and Fig. 8 of the accepted paper.
Future outlook
The newly developed robot teaching technology accelerates the use of robots in environments where they collaborate with human. We will continue to accelerate the social implementation of AI and robotics, and promote the research and development of AI technology that contributes to our customers' lives and work sites.
www.panasonic.com
