
www.ptreview.co.uk
18
'26
Written on Modified on
Volvo Construction Equipment keeps robot cells running with Visual Components OLP
By programming offline, the Konz plant avoids production downtime, achieves higher welding precision, and cuts programming time by up to 50%, boosting output and efficiency.
www.visualcomponents.com
Application Area: Offline Robot Programming (OLP), 3D Fabrication Simulation, Automated Robotic Welding Optimization
Industry Sector: Heavy Machinery Manufacturing, Automotive & Construction Equipment
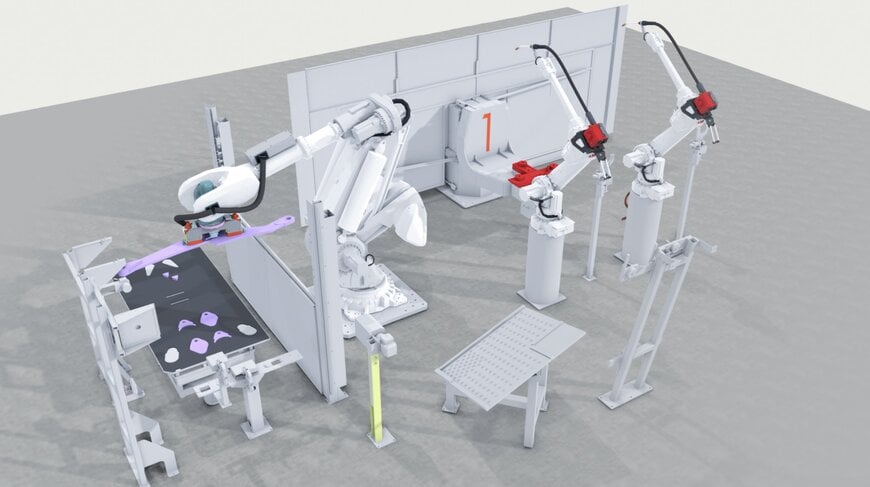
Volvo Construction Equipment has deployed Visual Components Offline Programming (OLP) software across its heavy machinery fabrication facilities to transition from manual, online robot teaching to an advanced virtual simulation model. The digital deployment integrates multiple robot vendor platforms into a single unified 3D workspace. By shifting path-planning and torch-orientation engineering offline, the facility maintains continuous three-shift operations, ensures path accuracy during complex welding sequences, and cuts toolpath programming times significantly.
Overcoming Online Programming Bottlenecks and Multi-Vendor Kinematic Inefficiencies
High-volume heavy manufacturing plants running continuous multi-shift production faces massive financial penalties whenever robot lines are paused for configuration. At the Volvo Construction Equipment plant in Konz, Germany, seven fabrication cells operating across three shifts must deliver a fixed daily output of eight wheeled excavators and ten compact wheel loaders. Because the factory relies on an assortment of older and newer automated cells from diverse manufacturers—specifically Yaskawa, IGM, and ABB—updating programs for design iterations historically presented severe operational hurdles.
Previously, developing or adjusting welding paths required technicians to step onto the shop floor, halt the active cell, and manually guide the physical robot arm point-by-point via a teach pendant. This manual online programming model directly cannibalized live manufacturing capacity, translating to immediate throughput losses. Furthermore, setting precise tool center point (TCP) trajectories and orientation paths for complex undercarriage and frame geometries by eye led to inconsistent weld quality, difficulties reaching restricted joints, and lengthy troubleshooting phases upon deployment. To mitigate these disruptions and protect its daily output targets, the facility implemented an offline software-defined simulation architecture.
Deploying a Unified Virtual Workspace for Rapid Multi-Axis Toolpath Simulation
The integration of the offline programming platform established a seamless transition from engineering design to automated shop-floor execution through several core technical capabilities:
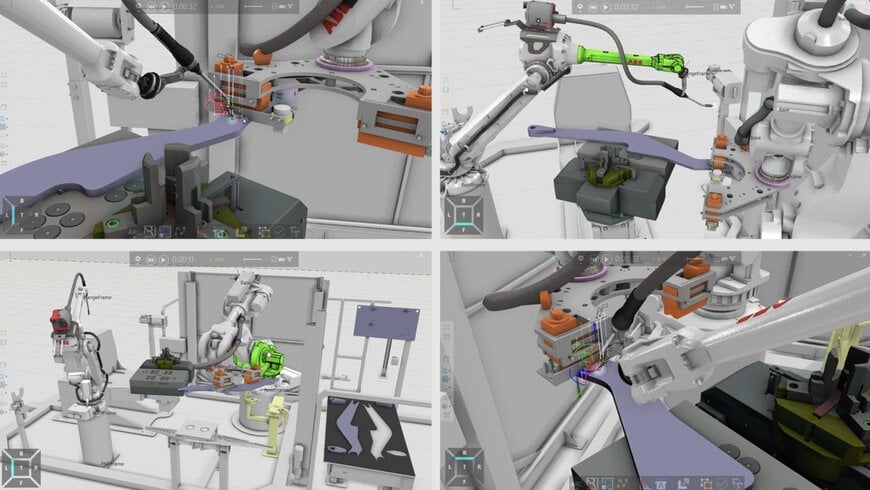
- Continuous Online Production via Virtual Workcells: Robotic programmers author, model, and test complete multi-axis trajectories inside an exact 3D digital duplicate of each automated cell while the physical machinery remains active on the production line.
- Precise Orientation and Torch Path Optimization: The platform enables precise virtual placement of jigs and parts. Programmers efficiently determine the optimal torch and robot joint orientations required to negotiate intricate weldments, enabling smooth, collision-free movement from the very first real-world cycle.
- Rapid Diagnostic Review and Cross-Department Collaboration: The moving 3D visualization functions as an analytical tool to identify geometric reach issues or design anomalies early. When specific path constraints or tight clearance limits appear questionable, developers share the exact simulation with the structural design team to resolve manufacturability issues before physical components reach the cell.
- Pre-Validated Fleet Readiness: By creating and testing programs entirely in the virtual layer, finalized control codes are deployed to the multi-vendor robot fleet in a ready state. The high fidelity of the path simulation minimizes shop-floor calibration to minor final touch-ups, lowering implementation costs and keeping the automated cells focused on high-precision welding.
Additional Context
The section below provides an evaluation of technical specifications not included in the original application story.
Operational Impact of Offline Programming vs. Teach Pendant Methods
Traditional manual robot programming relies on text-based teach pendants to record point coordinates relative to a localized tool coordinate system. Transitioning to a simulation-driven offline platform modifies the toolpath creation mechanism:
- Programming Time Reduction: Implementing graphical offline path generation cuts standard programming time by up to 50% for typical parts, enabling the fast transition of complex assemblies into active production queues.
- Path Precision Optimization: OLP software mathematically optimizes torch velocity profiles and limits joint-speed acceleration across multi-axis structures, which results in precise trajectory tracking compared to point-to-point path layout methods.
- Pre-Hardware Integration: Utilizing localized kinematic libraries allows engineering teams to program, simulate, and configure future automated lines before new robotic hardware or collaborative machinery physically arrives at the facility.
Structural Comparison of Automation Configuration Architectures
Transitioning from manual shop-floor teaching routines to a unified, multi-vendor 3D simulation platform alters key operational benchmarks across industrial manufacturing cells:
Transitioning from manual shop-floor teaching routines to a unified, multi-vendor 3D simulation platform alters key operational benchmarks across industrial manufacturing cells:
- Production Cell Availability: Under an online programming framework, cell availability is low because live machinery must be completely halted to teach and calibrate path points. Conversely, an offline programming environment provides high cell availability, allowing manufacturing processes to run without disruption while software toolpaths are written concurrently.
- Multi-Vendor Compatibility: Traditional manual teaching requires programmers to maintain separate expertise in brand-specific controllers and distinct teach pendant environments, such as those for Yaskawa, IGM, and ABB cells. An OLP architecture provides cross-brand standardization, unifying distinct robot kinematics and code generation under a singular, manufacturer-agnostic visual interface.
- Defect and Collision Management: Legacy on-floor adjustments are highly reactive, frequently uncovering structural interferences, joint reach limits, or weld defects during expensive live testing runs. The integrated simulation model provides proactive risk mitigation, isolating and resolving kinematic collisions, joint limits, and torch positioning errors inside the digital platform long before deployment.
Edited by Romila DSilva, Induportals Editor, with AI assistance.
